Ученые Университета МИСИС совместно с экспертами российской компании Cognitive Pilot предложили новый метод оценки точности системы локализации трамвая в городской среде. В настоящее время в городских условиях GPS позиционирование приводит к большим ошибкам, поэтому использование данной системы в качестве опорной затруднительно. Специалисты создали подход, который позволяет оценить точность определяемых координат по ключевым точкам, извлеченным из фото и видеоматериалов, сделанных во время многократных проездов трамвая по маршруту. Механизм является частью процесса тестирования алгоритмов, разработанных для системы помощи водителю.

Системы помощи водителю, которые сейчас устанавливаются на отечественные беспилотные трамваи производства ПК «Транспортные системы» и «Уралтрансмаш», призваны повысить безопасность городского транспорта в Москве и Санкт-Петербурге за счёт контроля скорости на маршруте, проезда перекрестков по сигналам светофора и предотвращения опасных приближений или столкновений с автомобилями и пешеходами.
Решение этих задач во многом зависит от точности локализации трамвая и его скорости. Наиболее критичными случаями являются проезды стрелок, пешеходных переходов, перекрестков, остановки на стоп-линиях светофоров. В этих случаях максимальная ошибка локализации не должна превышать одного метра.
Для повышения достоверности показателей точности организуются повторяющиеся проезды беспилотного трамвая по маршрутам. Этот подход прост, дешев и не требует много времени. Однако в ходе натурных испытаний трамвая выяснилось, что очень сложно определить опорные координаты с необходимой точностью, поскольку данные GPS необходимо дополнительно проверять на наличие ошибок из-за установки специального глушащего оборудования, наличия высотных зданий, искусственных помех, создаваемых электроустановками трамвая.

Для оценки точности навигационных систем специалисты НИТУ МИСИС предлагают сравнивать движение объекта, измеренное навигационной системой, с движением объекта, определяемым системой технического зрения. На основании полученных ошибок можно рассчитать среднеквадратическое отклонение для всех измерений в каждой группе и общую ошибку по всем группам. Для обнаружения ключевых точек и извлечения опорных точек из изображений ученые использовали различные компьютерные алгоритмы, включая нейронную сеть SuperPoint, обеспечивающую получение ключевых точек наилучшего на сегодняшний день качества.
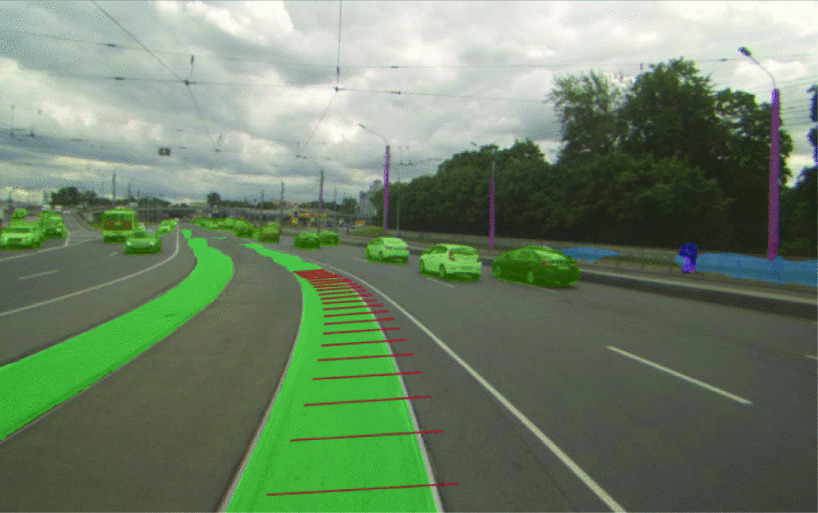
 “Чтобы вычислить матрицу преобразования между двумя положениями камеры, необходимо, чтобы пара изображений имела три или более совпадающих ключевых точек, лежащих на дороге. Среднеквадратические отклонения измерений пути находятся в диапазоне от 0 до 1,4 метра, что соответствует требованиям заказчика. При использовании этого подхода эффективно оценивается ошибка траектории, тогда как угловую ошибку легче оценить, используя информацию о перепроецировании дороги в кадре”, — сказал руководитель исследования д.т.н. Ринат Садеков, профессор кафедры инженерной кибернетики НИТУ МИСИС.
“Чтобы вычислить матрицу преобразования между двумя положениями камеры, необходимо, чтобы пара изображений имела три или более совпадающих ключевых точек, лежащих на дороге. Среднеквадратические отклонения измерений пути находятся в диапазоне от 0 до 1,4 метра, что соответствует требованиям заказчика. При использовании этого подхода эффективно оценивается ошибка траектории, тогда как угловую ошибку легче оценить, используя информацию о перепроецировании дороги в кадре”, — сказал руководитель исследования д.т.н. Ринат Садеков, профессор кафедры инженерной кибернетики НИТУ МИСИС.
Данный подход уже используется наравне с другими онлайн-методами оценки точности позиционирования городского транспорта. На сегодняшний день в Санкт-Петербурге системами помощи водителя трамвая оснащены уже более 100 вагонов.



